PROPUESTAS DE SOLUCIÓN
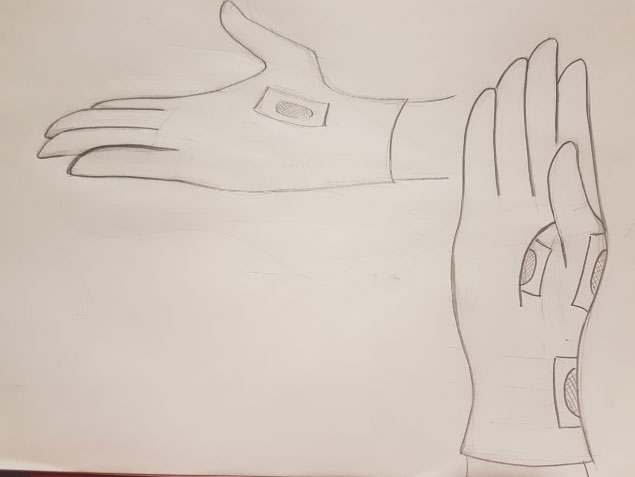
1. Muñequero de terapía pasiva intensiva
Muñequero hecho en base de Soft robotic con capacidad de rehabilitación mediante masajes en áreas cercanas a los tendones con el fin de evitar la tensión en los musculos que producen la fricción en los tendones. El objetivo general de este guante es permitirle al pulgar moverse dentro de los grados de libertad que impidan un exceso de fricción en los tendones, y realizar masajes que relajen los musculos del brazo y muñeca, en caso estos se tensionen y generen la fricción.Se incorporará un líquido terapeutico amortiguador que restrinja rangos peligrosos del movimiento en el pulgar y que puedan realizar daños a este. Esta terapia se caracteriza por ser pasiva en un intervalo de recuperación muy corto, comodo y seguro. Asimismo, la ventaja de este dispositivo sobre los existentes radica en su versatilidad y adaptibilidad al paciente,que a diferencia de una ferula, le permite realizar trabajos cotidianos sin generar estres sobre los tendones y con el complemento de relajación muscular.
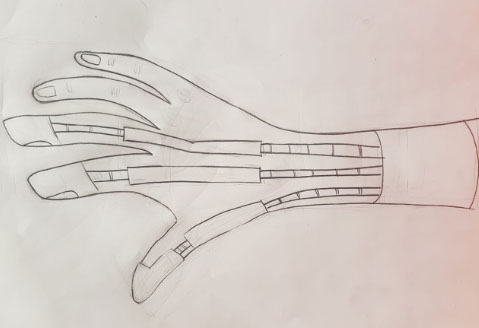
2. Guante de rehabilitación física
Guante con la capacidad de ofrecer una resistencia al movimiento del pulgar con regulación de fuerza. Se inducen movimientos en el pulgar dentro de los rangos de movimiento que se regulan de acuerdo al diagnostico del paciente y sus necesidades. La terapia consiste en generar una fuerza sobre el pulgar desde la palma de la mano tal que ejercite al pulgar de manera continua y constante durante los intervalos de tratamiento y dentro de los rangos de movimiento, evitando así un mayor estres sobre los tendones y fortaleciendo los musculos de la muñeca y del pulgar. De esta forma, y proyectando su prinicpal ventaja; la terapia fortalece los musculos y tendones del pulgar induciendo a una mayor lubricación sobre la vaina sinovial.
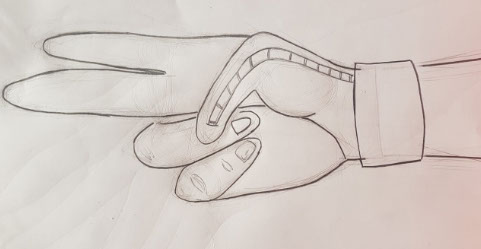
3. Exoesqueleto generador de fuerza complementaria
Soft robotic exoskeleton con la capacidad de ejercer fuerza sobre el pulgar que complemente a la fuerza del pulgar al momento de realizar sus actividades. El dispositivo obedecerá a las señales derivadas de impulzos mioelectricos que accionarán las cámaras al mismo tiempo que el pulgar realize su trabajo; complementando su fuerza según como lo requiera el paciente. Asimismo, cuando la muñeca se encuentre en reposo, realizará masajes sobre los musculos tensionados con el objetivo de relajarlos, evitando de esta manera una fricción innecesaria de
Diseño de exoesqueleto suave que complementa la fuerza realizada durante su tarea diaria, asimismo que realiza un masaje para relajar los tendones.
JUSTIFICACIÓN
En general existe un consenso de que el problema en la tendinitis de De Quervain es la inflamación de los tendones que ocasiona fricción al generar movimientos del pulgar y que se vuelve parte de una condición crónica por actividades repetitivas. Se ha pensado que la solución debería optar por empezar con sesiones terapéuticas que imiten los masajes realizados en la fisioterapia, esto sería a través de soft-robotics y podría disminuir la cantidad de dolor e incomodidad que sentiría el sujeto al momento de realizar actividades. Se ha visto precedentes de soft robotics aplicado a masajes (Tong, Mingle 2014), los cuales podrían diseñarse a las medidas de la mano y que se encargue de relajar el área de los tendones, todo esto tendría que adaptarse a las medidas de la paciente, se tiene también la idea que debe haber un sensor de tensión y torque, que nos muestre el ángulo de inclinación de los dedos y la cantidad de fuerza que están utilizando, todo esto para poder aplicar distintos grados de masaje terapéutico. De igual manera, también se ha encontrado precedentes al buscar un diseño de exoesqueleto que complemente la fuerza y facilite realizar actividades (P. Polygerinos, et al. 2014) , también diseñado para una rehabilitación en casa, podemos extrapolar un diseño más enfocado en facilitar el agarre de la tijera corta pollos y que por lo tanto, demande menos esfuerzo por parte del sujeto y que pueda realizar la actividad con más facilidad. Así mismo, ofrecer una resistencia al movimiento para demandar al paciente que realice con mayor fuerza el movimiento de abrir y cerrar la mano (flexión y extensión de los tendones de los dedos) puede imitar ciertos ejercicios realizados en la fisioterapia, por lo que lentamente puede ir ganando fuerza en los tendones y de igual manera, posiblemente disminuyendo el dolor.
Finalmente, hemos visto que se puede optar por una de estas propuestas de solución, ya que todas tratan de enfocarse en disminuir el dolor y la inflamación que se tiene en los tendones afectados en la tendinitis de De Quervain y también en facilitar a la señora en realizar sus actividades con menos esfuerzo.
REFERENCIAS
-Tong, Mingle (2014), Design, Modeling and fabrication of a massage neck support using soft robot mechanism, Ohio State University.
-P. Polygerinos, et al.,(2014) Soft robotic glove for combined assistance and at-home rehabilitation, Robotics and Autonomous Systems.
-P. Polygerinos, et al.(2015) EMG controlled soft robotic glove for assistance during activities of daily living. IEEE International Conference on Rehabilitation Robotics.
