ACTUADORES
Soft Robotic Glove for Hand Rehabilitation and Task Specific Training
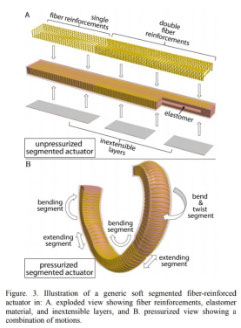
El diseño del actuador suave presentado en este trabajo consiste en vejigas elastoméricas rectangulares de perfil delgado reforzadas con materiales limitadores de tensión para crear propiedades anisotrópicas en la pared de la vejiga. Tras la presurización del fluido, la vejiga se tensará preferentemente en direcciones determinadas por los refuerzos de fibra. Hubo 4 tipos de movimientos: doblar, doblar-torcer, extender y extender-torcer.
Lo beneficioso de este diseño es que permite movimientos completos en el que se puede generar más de un movimiento en serie a lo largo de un actuador. De igual manera como hay varios actuadores multisegmentos esto permite un rango total de movimiento para cada dígito.
Lo negativo es el peso de los componentes que son montados en la mano y brazo por como pueden restringir la libertad de movimiento en el que lo use. Otro problema es la cantidad de veces que puede actuar el actuador (30 flexiones y extensiones por minuto).
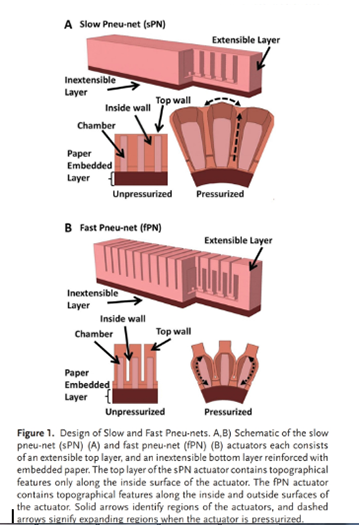
Pneumatic Networks for Soft Robotics that Actuate Rapidly
Puntos positivos: Se acciona instantáneamente con un rango de fuerza mayor que el de otros modelos de soft robotics. Es el modelo con más ciclos de vida (990 aprox) de acuerdo a la tensión que recibe el actuador.
Puntos negativos: La presión llega hasta 345 kPa por lo que es una presión por encima de lo que se puede replicar, puede complicar la aplicación en nuestro modelo.
Fabricación complicada con riesgo de explosión. La flexión no es uniforme en ciertos casos, esto va a depender del modo de fabricación.
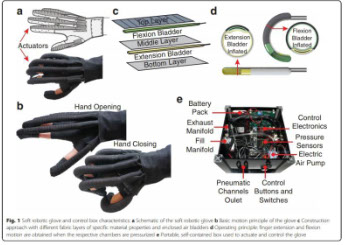
Assisting hand function after spinal cord injury with a fabric-based soft robotic glove
El guante robótico suave está diseñado para aplicar la fuerza suficiente para abrir y cerrar cada dedo, lo que permite agarrar y levantar objetos ligeros. Debido a su estructura intrínsecamente compatible, el guante es capaz de agarrar objetos con diferentes formas. Anteriormente se demostró que el guante puede hacer que un usuario sano agarre un objeto con una fuerza de 15 N. Presurizado a 172 kPa.
Puntos positivos de este actuador: Puede realizar una fuerza complementaria total de hasta 15 N, si es que queremos facilitar el movimiento de corte en personas, 15N es una fuerza complementaria suficiente para poder realizar el movimiento de flexión y extensión de los dedos. Provee un buen agarre palmar por sobre un agarre de peñizco, este agarre palmar es el que deseamos para el corte de tijera. Tiene un peso ligero y mínima molestia para el usuario.
Puntos negativos de este actuador:
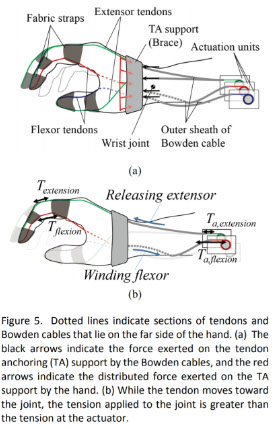
Exo-Glove: A Soft Wearable Robot for the Hand with a Soft Tendon Routing System
Puntos positivos: La suma de las fuerzas ejercidas en los dos dedos llegó a 20N.
Puntos negativos: Se tuvo que diseñar un sistema complejo de poleas y tendones de cuerda para poder evitar lesiones en la mano, diseño que podría difícil de replicar o adaptar para nuestro guante.
DISTRIBUIDORES DE FUERZA
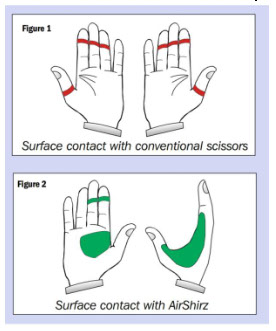
Advanced Ergonomic Benefits of Pneumatic Scissors:
El peso de una herramienta de mano se acopla con el movimiento que es necesario para realizar cada tarea. Un trabajador no solo tiene que equilibrar la herramienta peso, sino también activar la herramienta y realizar los movimientos necesarios para completar el trabajo.
Las tijeras estándar utilizadas en la industria avícola pesan 0.5 libras y se equilibra en 5.13
pulgadas cuadradas de la mano.
La unidad AirShirz pesa aproximadamente 1.28 libras pero está equilibrado en el aductor
pollicis, flexor brevis pollicis y abductor pollicis entre el dedo índice y el pulgar.
Se calculó que la fuerza necesaria era de 22 N.
Lo beneficioso de este enfoque de distribución de fuerza es que nos permite saber cuál es la posición de agarre que podría tener una tijera para poder disminuir el estrés que recae en la mano de las personas al realizar el corte y también que se puede incrementar la productividad.
Lo negativo de este enfoque es que se diseñó una nueva tijera neumática y ese no es un enfoque de solución biomédica, por lo que nosotros necesitamos adoptar ciertas cosas que ellos hicieron y darle nuestro enfoque
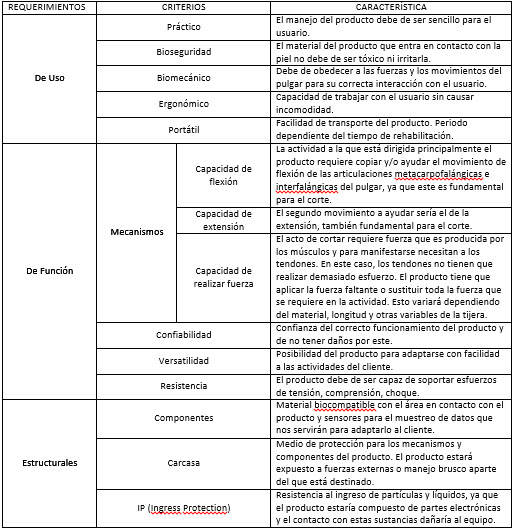
REQUERIMIENTOS DE DISEÑO
ver video
BIBLIOGRAFÍA