INICIO
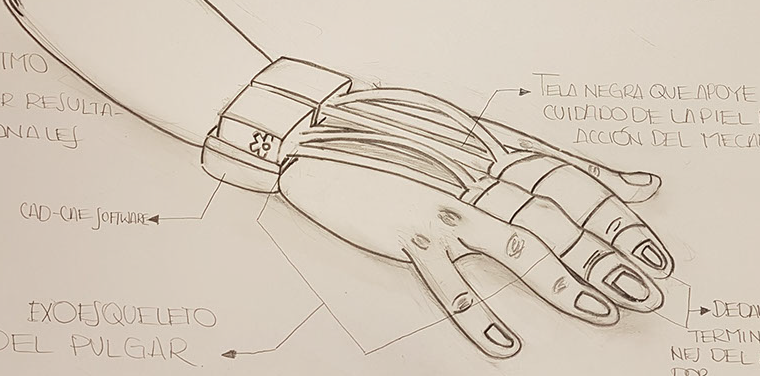
DISEÑO MODULAR:
LISTA DE MATERIALES
ENTRADAS Y SALIDAS DEL SISTEMA
FUNCIONABILIDAD -> TECNOLOGÍA
ELECCIÓN DE TRES CONCEPTOS
EVALUACIÓN DE CONCEPTOS
DISEÑO MODULAR Y LISTA DE COMPONENTES
DISEÑO MODULAR
Entradas y salidas del sistema
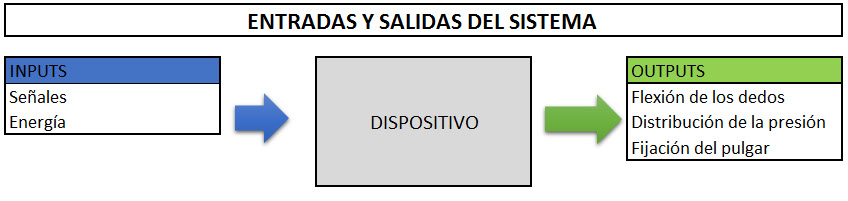
Entradas:
Señales:
Conjunto de indicaciones que despide el brazo y la muñeca en conjunto al momento de realizar sus actividades. Estas señales serán captadas por el dispositivo como órdenes para accionarse inmediatamente.
Energía:
Energía que alimenta y acciona al sistema. Se encarga de accionar principalmente a los actuadores principales así como alimentar a las unidades de control y sensores.
Salidas:
Flexión de los dedos:
El exoesqueleto accionado por los actuadores, producirá un movimiento forzado sobre los dedos y generará la fuerza complementaria necesaria a los dedos para poder cortar la carne del pollo.
Distribución de Presión:
La placa situada el la palma de la mano redistribuye la presión que ejercen los mangos de la tijera sobre una zona puntual en la mano. Cuando esta presión es redistribuida en la palma de la mano, el esfuerzo que ejercen los dedos para cortar será menor.
Fijación del pulgar:
El pulgar se mantendrá en una posición fija durante toda la actividad y así evitar caer en un nuevo caso de tenosinovitis.
Funcionabilidad -> Tecnología empleada
FUNCIONES
Flexionar los dedos: Producir movimiento de flexión sobre los dedos, rápidamente para complementar la fuerza de los dedos para cortar el pollo. El accionamiento debe ser de manera instantánea y obedecer al estímulo natural de la flexión en los dedos
Sensar la flexión de los dedos: Obtener inmediatamente la señal precisa de que los dedos están en inminente posición para ejercer la acción sobre la tijera para cortar el pollo. esta señal debe ser confiable y específica ya que solo debe leer cuando los dedos se flexionen para cortar el pollo, mas no para otra acción similar.
Afincar el pulgar: Mantener el pulgar en una determinada posición donde los músculos relacionados con los tendones extensor corto y abductor largo esten relajados y no se sometan a movimiento alguno.
Distribuir la fuerza: Distribuir fisiológicamente sobre los dedos y la palma de la mano la fuerza generada por el mango de la tijera al momento de cortar el pollo. Principalmente usado para disminuir la fuerza ejercida por los dedos para cortar el pollo y amortiguar el estrés de los materiales semirígidos utilizados.
Elección de tres conceptos
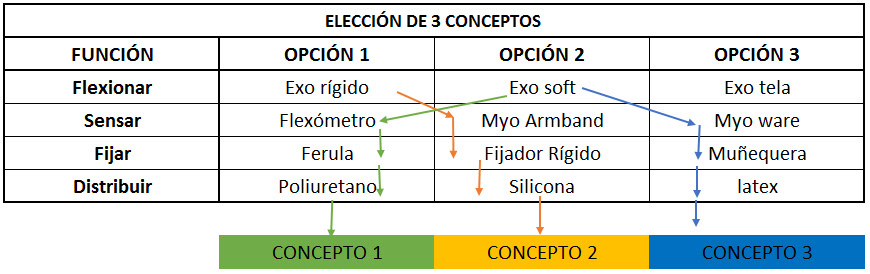
Para la elección de conceptos se usaron criterios de suficiencia de energía, es decir que la energía empleada por el dispositivo debe complementarse entre sus componentes. Asimismo que la calidad de señal captada debe ser proporcional y necesaria a la complejidad del proceso que realice. en tercera instancia, el tipo de fijador del pulgar debe ser compatible con el flexionador de los dedos, que no interrumpa ni perjudique su accionamiento.
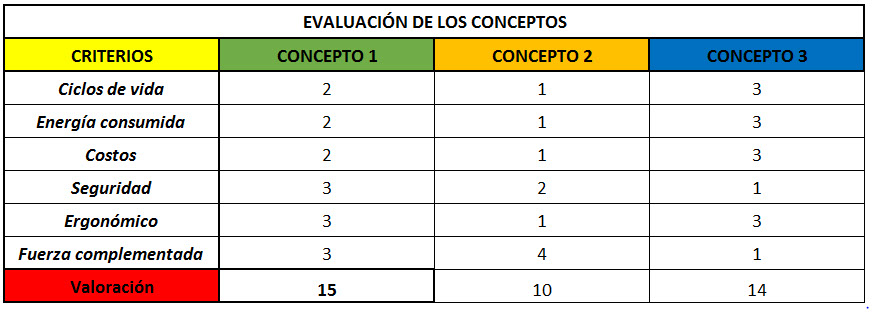
Evaluacion de conceptos
LISTA DE MATERIALES
Bateria de litio:
Capaz de proveernos energía eléctrica por prolongados periodos de tiempo (3 a 4hs) para la actividad del paciente. Asimismo, la batería se puede recargar en poco tiempo (1 hora); es decir, económica, reusable y versátil. no impide la actividad del paciente
Microbomba CTS:
Capaz de proveernos la presión necesaria para accionar los actuadores de esta naturaleza (según el estado del arte consultado). Es de bajo peso y dimensiones pequeñas; capaz de ser portátil y ligero. no impide la actividad del paciente
Exo soft:
Hecho a base de siliconas que no son conductoras de calor; esto es importante ya que estarán expuestos a temperaturas altas. Además son ligeras y ergonómicas, capaces de adaptarse a la morfología de la extremidad.
Flexómetro:
Sensor ligero no invasivo de peso casi despreciable y tamaño apropiado para los dedos (largo). Envía una señal inmediata a la unidad de control (señales eléctricas)
Válvula solenoid:
Válvula automática capaz de responder a señales de la unidad de control y actuar de manera independiente de atención. no impide la actividad del paciente
Placa de poliuretano:
Material viscoelástico. Replica propiedades del ácido hialurónico (amortiguador natural de las articulaciones). Asimismo, se le conoce también por ser una espuma de memoria de forma, esto facilita al paciente por que se adapta a su morfología y a su agarre de la tijera.
Arduino Nano:
Controlador de pequeñas dimensiones y muy ligero. Complementado con un arduino nano adicional es capaz de procesar la programación designada. no impide la actividad del paciente.
Ferula:
La ferula debe inmovilizar al pulgar (semirígido) pero tambien debe sorportar la fuerza del mango de la tijera cuando esta se apoye sobre este. para ello se emplearán dos tipos de materiales para permitir esta naturaleza en la ferula.
TPE:
es usado en la fabricación de prototipos, debido a que se puede usar en la impresión 3D.
PLA:
El ácido poli láctico es un polímero biodegradable, el cual tiene resistencia a la tracción y su módulo de elasticidad es parecido al polietileno, aunque es más hidrofílico (densidad más baja). Es usado en el ámbito médico debido a sus propiedades bioabsorbible y biodegradable, ayudando a los implantes en los huesos, cirugía ortopédica, suturas, etc.
Guante:Fibra aramida: mayor resistencia térmica y mecánica.
Látex de goma: Material ligero, más elástico, el cual le da permeabilidad.
Capa de algodón, generando mayor comodidad y suavidad al tacto con la mano del paciente.
Uso de silicona para generar fricción al contacto con los instrumentos de cocina.
OTRAS ESPECIFICACIONES