DIAGRAMA DE BLOQUES
Los dedos se flexionan al momento de ejercer fuerza a la tijera para cortar la carne, cuando este rango de flexión sobrepase un angulo de 60 grados respecto a la palma de la mano, el sensor de flexión enviará una señal al Arduino Nano.
La unidad de control accionará la válvula, tal que esta permita el ingreso de aire a las cámaras.
Las cámaras al contener un volumen de aire, generarán movimiento de bending sobre los dedos y complementarán la fuerza de estos.
BOCETOS
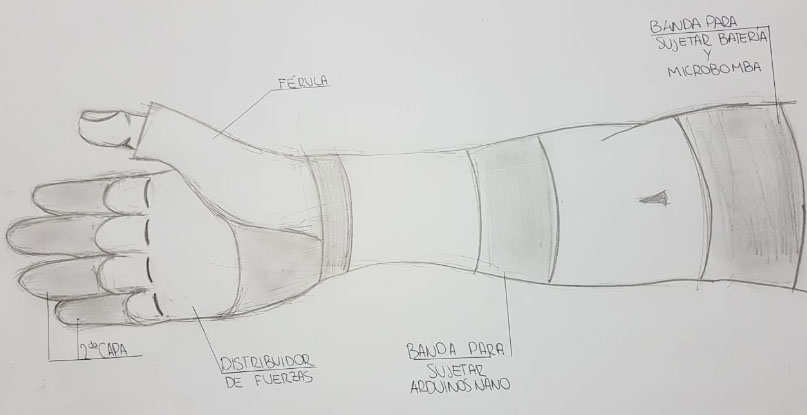
BOCETO 1
Es una vista de la zona palmar donde se ubicará la férula semi rígida, una corredera que enseñará al paciente la correcta posición para el corte del pollo, un distribuidor de fuerza a base de poliuretano, una muñequera que permitirá la fijación de la férula y donde se distribuirán las mangueras para el soft, por último se tienen dos bandas: en la del antebrazo estarán los Arduino manos, y la otra será entra el hombro y el codo donde se ubicará la micro bomba y batería.
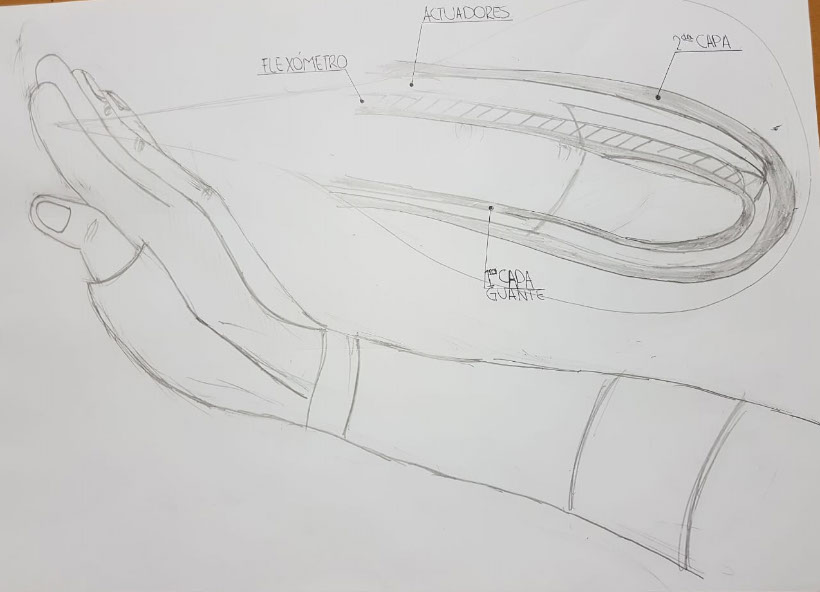
BOCETO 2
Es una vista del interior de del guante para los dedos índice y medio. Se tienen las siguientes capas: Guante deportivo, flexómetro, dedal, actuador y otro guante que mantenga protegido el sistema al momento de la interacción al cortar el pollo.
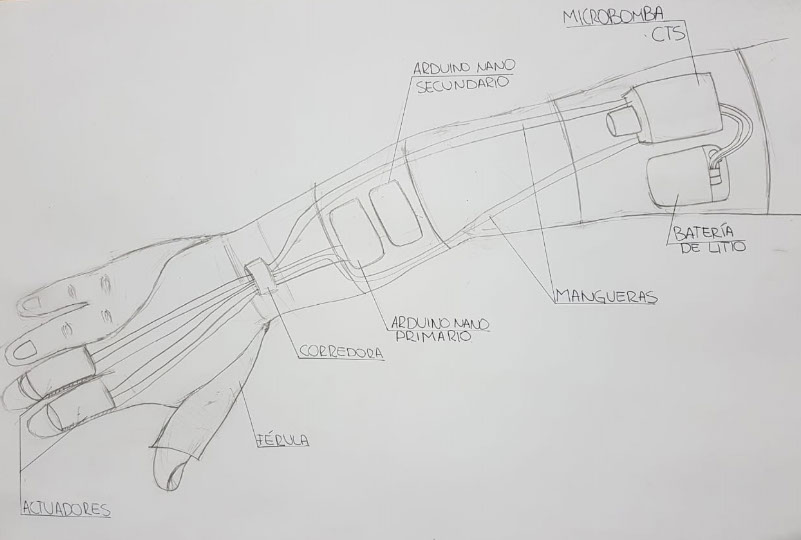
BOCETO 3
Es una vista de la parte superior de la mano, donde se puede visualizar el sistema en general, donde se utilizará un sistema externo para colocar una válvula que genere la suficiente fuerza para la asistencia en fuerza de los dedos índice y medio.
(Primera idea del diseño, se descarto por exceso de fuerza torque, ya que el peso sobre el miembro superior no se considera completamente ergonómico) el modulo central del dispositivo (guante, ferula y actuadores) seguirá presente obviamente; sin embargo el modulo actuador tendrá la capacidad de ensamblarse al central.
DISEÑO PRELIMINAR
Es un diseño virtual de los actuadores que serán unidos a la válvula, en este caso se da una vista para los cuatro dedos que excluye al pulgar, el cual será sujeto a una férula semi rígida.

.jpg?crc=108995232)